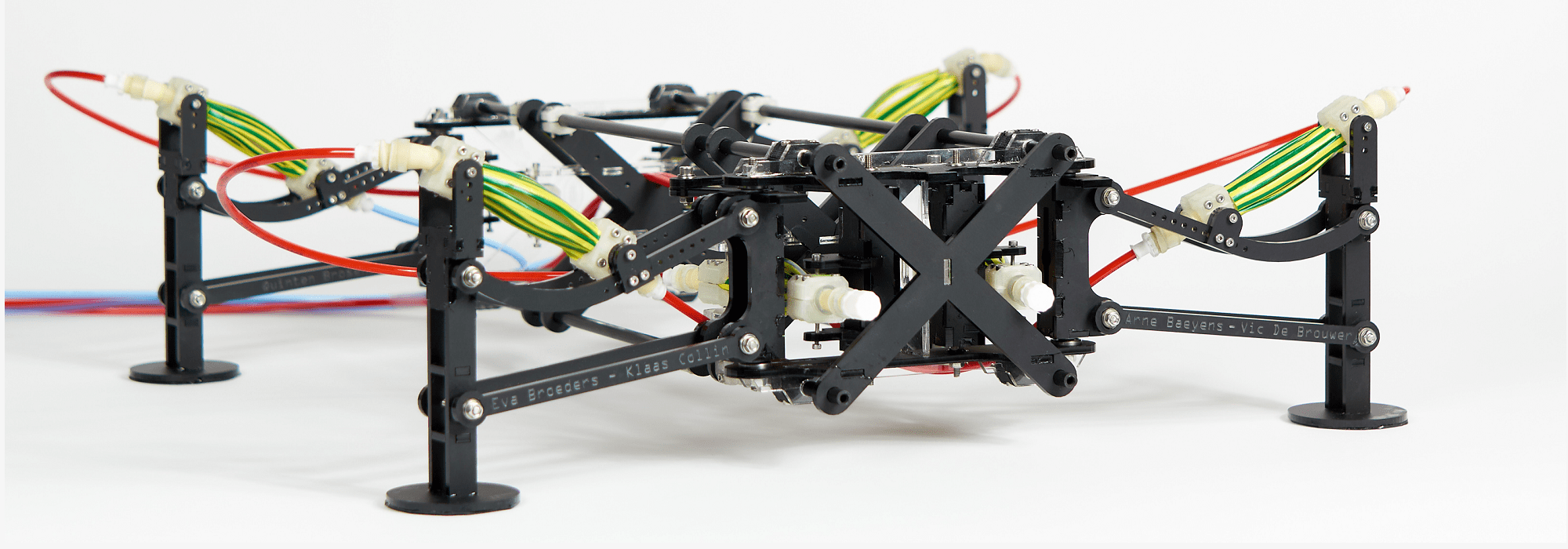
Tethering pneumatic soft robots with multiple degrees of freedom is bulky and unpractical. Our work just published in Advanced Materials describes a new approach to embed hardware intelligence in soft robots where multiple actuators are attached to the same pressure supply, and their actuation sequence is programmed by the interaction between nonlinear actuators and passive flow restrictions.
https://onlinelibrary.wiley.com/doi/full/10.1002/adma.201804598



