Inflatable soft robots are much more than soft actuators for gripping delicate objects. They are rich dynamic structures capable of memory and computations all on their own. Carefully designed soft robotic systems therefore do not require any electronic control at all to perform complex functions. Instead, their geometry and materials automatically react to stimuli from the user or from the environment in a meaningful way. This concept is called embodied intelligence and promises extremely cheap, robust or small soft robots capable of autonomously executing tasks in complex environments. However, as of yet it is unclear how to design soft robots such that they accomplish a certain function automatically. To answer this need, we are developing a python library called FONS (Fluidic Object-oriented Network Simulator).
FONS lowers the design barrier for a class of soft robots with the potential for embodied intelligence by making it extremely easy to simulate them. This is the class of soft robots that can be represented as lumped fluidic networks. They consist of discretely identifiable components such as actuators, connecting tubing and active sources that only interact with each other through the fluid that they share (rather than through e.g. contact with a common object). Most soft robots in literature can be abstracted as such a lumped fluidic network.
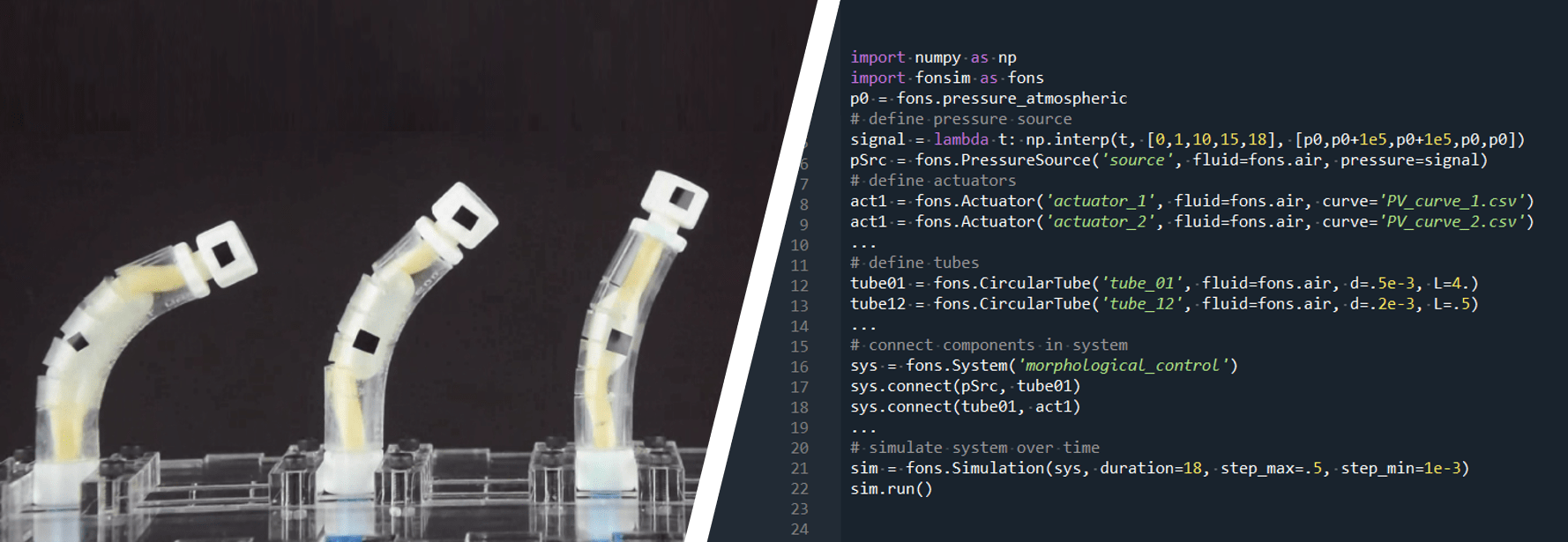
To model a lumped fluidic network in FONS, the user needs models for all individual components. These models can be experimental data, numerical simulations or parametrized analytical equations. FONS then provides a platform to link these components together in a system filled with a fluid and simulate its behavior over time in only a couple of lines of code. Its front-end is user-friendly, does not require any knowledge of network theory to operate and is compatible with many standard python functions. Its back-end is an object-oriented implementation of formalized network theory where every component is abstracted to a set of differential-algebraic equations relating the pressure and massflow in the component together. That allows more advanced users to define custom component types without having to make changes elsewhere in the code.
We release FONS as a free and open-source project equipped with ample tutorials for anyone to experiment with how embodied intelligence can emerge in fluidic networks. We also welcome any contribution to add features to FONS or to increase its library of ready-made components tailored to the field of soft robotics and beyond. Find the source code here!
