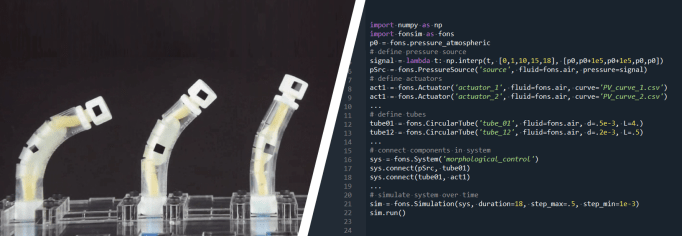
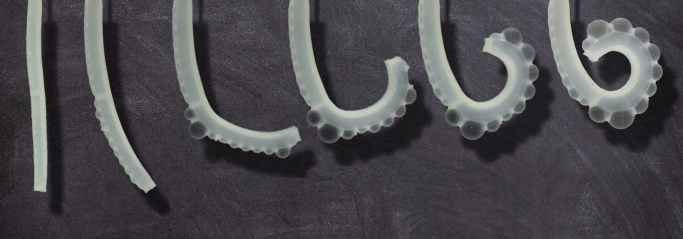
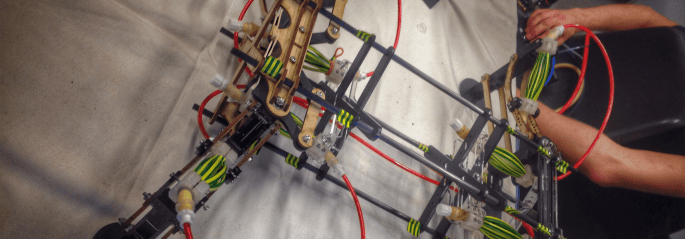
Inflatable soft robots are much more than soft actuators for gripping delicate objects. They are rich dynamic structures capable of memory and computations all on their own. Carefully designed soft robotic systems therefore do not require any electronic control at all to perform complex functions. Instead, their geometry and materials automatically react to stimuli from the user or from the environment in a meaningful way. This concept is called embodied intelligence and promises extremely cheap, robust or small soft robots capable of autonomously executing tasks in complex environments. However, as of yet it is unclear how to design soft robots such that they accomplish a certain function automatically. To answer this need, we are developing a python library called FONS (Fluidic Object-oriented Network Simulator).
Continue reading “Modelling embodied intelligence in soft fluidic networks with FONS”