Now online!

Now online!
The semester is over and so it is the Soft robotics project 2018/19 for bachelor students of Engineering Sciences here at KU Leuven! The goal was to design and fabricate a Soft robot, which has at least two different locomotive modes. The final prototypes were shown during the demoday at the Department of Mechanical Engineering. Congratulations everybody!
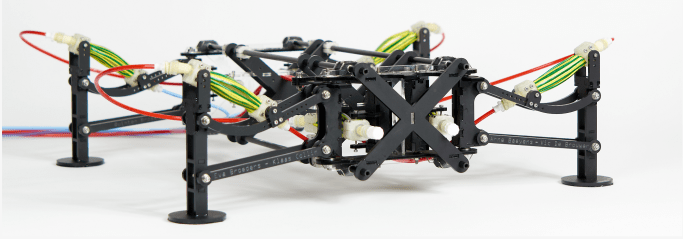
Tethering pneumatic soft robots with multiple degrees of freedom is bulky and unpractical. Our work just published in Advanced Materials describes a new approach to embed hardware intelligence in soft robots where multiple actuators are attached to the same pressure supply, and their actuation sequence is programmed by the interaction between nonlinear actuators and passive flow restrictions.
https://onlinelibrary.wiley.com/doi/full/10.1002/adma.201804598



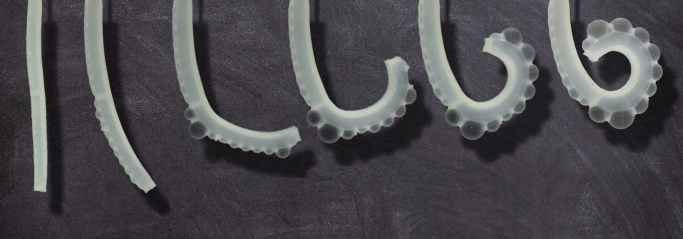
We welcome Andrea, who will be a visiting student for this semester. Her work focuses on multi-segmented flexible bending actuators having an hardware-encoded inflation sequencing.

When looking at soft robots, people may immediately see movable rubbery structures and be astounded by such devices, which recall octopus tentacles, earthworms and other organisms. But already at a second sight, some might question the effectiveness of such compliant structures when compared to well-known hard robots, which revolutionized automation and manufacturing industries, and start wondering where the main weaknesses lie. Continue reading “Intelligence emerges from complexity”
